… Hay 3 pseudociencias: alquimia, astrología e hidroacústica.
De la experiencia práctica en hidroacústica

Oposición
prefacio
Las cuestiones y problemas de la guerra submarina moderna de la guerra submarina moderna se consideraron en las páginas de "VO" más de una vez:
Escándalo del torpedo ártico.
Amenazas reales en el Ártico: desde el aire y desde debajo del agua.
APKR "Severodvinsk" fue entregado a la Armada con críticas para la efectividad de combate de los toques finales.
Antitorpedía. Todavía estamos por delante, pero ya estamos adelantando..
¿Dónde está corriendo el almirante Evmenov?
Defensa antisubmarina: barcos contra submarinos. Hidroacústica.
Defensa antisubmarina: barcos contra submarinos. Armas y tácticas .
Sin embargo, es imposible una divulgación completa del tema sin considerar los problemas de la hidroacústica submarina, con énfasis en su desarrollo y efectividad real (de combate). Cabe señalar que esta es la primera vez que se implementa un enfoque tan integrado del tema.
Parte 1. Primera y segunda generación. Hidroacústica de la Gran Guerra
En 1930, en Alemania, una comisión encabezada por el conocido científico soviético (y ex comandante de submarinos) A.I. Berg compró radiogoniómetros de sonido para los primeros submarinos nacionales. En 1932, sobre la base de los radiogoniómetros alemanes recibidos (SHPS, estación de radiogoniometría del ruido), se desarrollaron los primeros SHPS domésticos "Mercury" y "Mars". Sin embargo, los problemas con su calidad llevaron a nuevas compras de radiogoniómetros alemanes en los años 30 (solo en 1936 - 50 sets).
El destacado historiador ruso M.E. Morozov escribió:
De hecho, estábamos aún más versados en hidroacústica alemana que nuestros aliados: nuestros radiogoniómetros de sonido de Marte eran hermanos de los GEI alemanes, y los sonares de Tamir eran S-Gerat alemanes.

U-Boat U-2, la colocación de los hidrófonos SHPS es la misma que en nuestros submarinos
No podemos estar de acuerdo con la opinión sobre el "buen conocimiento" de las estaciones hidroacústicas alemanas (GAS): si en características técnicas formales nuestro "Marte" era realmente similar al GEI alemán, entonces en capacidades de combate reales eran simplemente incomparables.
Los Aliados, después de haber recibido el buscador de dirección de ruido alemán (por primera vez en el submarino U-1942 capturado en mayo de 570), se sorprendieron por su alta capacidad de combate, y el factor clave aquí fue un conjunto de medidas para garantizar su alta inmunidad y sensibilidad al ruido, solo el hecho de que fue en gran parte pasado por alto por nosotros.
Sobre el radiogoniómetro del submarino "D-2" estaba escrito:
El asunto se vio agravado por el mal estado de la estación Mars-16, que podría utilizarse bien bajo motores eléctricos de velocidad económica, o en la superficie sin moverse con una onda de no más de 2 puntos. La estación cometió grandes errores al determinar el rumbo de la fuente de ruido.

Compensador SHPS "Mars-16" submarino "D-2"
El quid de la cuestión era que las estaciones de GEI tenían una frecuencia relativamente baja (con un límite inferior de mucho más de 1 KHz) y, al carecer de los medios necesarios de protección contra la interferencia, "la recogieron con una pala".
Además, al tener una base pequeña, incluso en una forma totalmente útil, el "Marte" tenía un gran error de búsqueda de dirección, un alto nivel de lóbulos laterales y una mala resolución del ángulo de rumbo. Por ejemplo, durante el ataque de nuestra formación alemana K-21 con el acorazado Tirpitz, teniendo en cuenta el continuo ruido del frente y la imposibilidad de encontrar direcciones separadas de los objetivos de Marte, el K-21 resultó estar absolutamente "ciego" bajo el agua durante el ataque.
Así, incluso en los inicios de su desarrollo de la hidroacústica submarina, el factor de inmunidad al ruido se convirtió en uno de los factores determinantes en el desarrollo y las capacidades reales del GAS.
La experiencia alemana en la solución de este problema técnico durante la década de 30 y principios de 40 es de gran interés. Además de la alta cultura técnica general de la fabricación, el uso del desacoplamiento acústico, los desarrolladores alemanes han introducido un conjunto de filtros de frecuencia de paso de banda (de hecho, bandas de subfrecuencia separadas) con tres valores promedio de 1, 3 y 6 kHz. Al mismo tiempo, durante los ataques, las subbandas de 3 y 6 kHz fueron las más utilizadas, que proporcionaron la mejor precisión (error de 1,5 ° y menos de 1 °, respectivamente) y la posibilidad de radiogoniometría por separado de objetivos cercanos.

GEI ShPS alemán.
En el Atlántico, el rango de detección del GHG NLS para objetivos individuales (en la sub-banda de baja frecuencia) alcanzó 20-30 km, para convoyes - 100 km.
El diseño de la antena SHPS de gran tamaño (con una buena base) dio muy buen efecto como un "dispositivo de balcón" aerodinámico separado.

Dispositivo de balcón »SHPS GHG mediados de la Segunda Guerra Mundial

Extremos nasales de la serie PL XXI con "dispositivo de balcón" GEI
Las características de alto rendimiento de las últimas variantes del GHG ShPS aseguraron el uso efectivo y encubierto de los torpedos por parte de los submarinos de las nuevas series XXI y XXIII, y los aliados tuvieron mucha suerte de que solo un número extremadamente pequeño de ellos logró entrar en servicio con la Kriegsmarine.
Primera generación de posguerra. nosotros
La nueva situación político-militar tras el fin de la Segunda Guerra Mundial requirió la construcción acelerada de la Armada y sus fuerzas submarinas al nivel más moderno.
Se realizó un trabajo honesto y duro sobre los errores en la creación de su propio GAS, el GAS de los aliados y la experiencia alemana fueron estudiados con mucho cuidado (incluso en el curso de temas especiales, por ejemplo, el "Trofeo" de 1946).
Prácticamente todas las ramas de la ciencia, no solo la cohetería y aviación, sino también hidroacústica.
En 1946, en OKB-206 de la planta de Vodtranspribor, comenzó el trabajo en la creación de una moderna estación unificada de barco a fuego "Phoenix" para los submarinos del gran programa de construcción naval de la Armada de la URSS. El prototipo del ShPS se instaló en el submarino capturado de la serie XXI y pasó con éxito las pruebas estatales (GI) en 1950.

SHPS "Phoenix" en el stand
SHPS "Phoenix" resultó ser un desarrollo extremadamente exitoso que parecía bastante decente en el contexto de los análogos extranjeros (por ejemplo, el estadounidense AN / SQR-2).

Reloj hidroacústico en SHPS "Phoenix"
Antena cilíndrica de 132 receptores magnetoestrictivos, método de búsqueda de dirección de fase, que aseguró salida de datos de alta precisión (error menor a 0,5 °) para el disparo de torpedos, integración con una estación de sonar (HS) de doble frecuencia (15 y 28 kHz) Tamir-5L (en adelante al actualizar reemplazado por "plutonio") y el modo de comunicación de código entre submarinos. La elección correcta del rango de frecuencia (¡el resultado de un estudio muy cuidadoso de la experiencia extranjera!) Proporcionó una buena inmunidad al ruido y resolución de rumbo para objetivos cercanos.
Para el submarino doméstico más masivo del proyecto 613, la antena del Phoenix ShPS se ubicó en un análogo del "dispositivo de balcón" de los submarinos alemanes junto con el Tamir-5L GLS (que fue reemplazado por Plutonium durante la actualización).
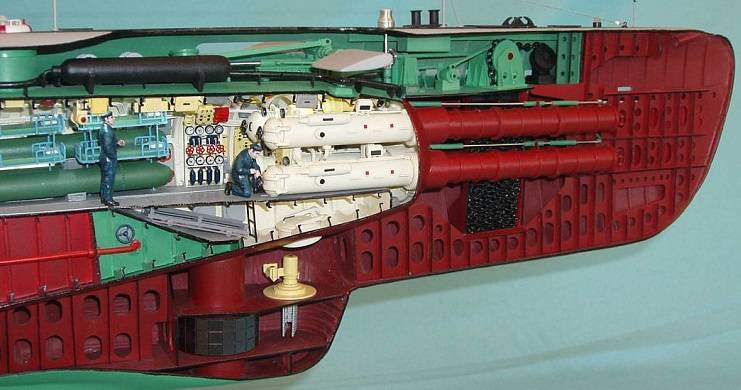
La proa del submarino del proyecto 613 con el recinto GAS (con las antenas Phoenix y Plutonium)
En 1956-1959. OKB-206 realizó dos trabajos de diseño experimental (I + D) para modernizar el Phoenix ShPS: Kola (implementación del modo de seguimiento automático de objetivos, ASTs) y Aldan (aumentando la sensibilidad e implementando el método de correlación de radiogoniometría e inspección circular del horizonte con un período 30 o 60 s debido a la rotación continua del interruptor de antena). El ShPS modernizado se puso en servicio en 1959 con la designación MG-10.
A principios de los años 60 se llevó a cabo otra modernización: MG-10M con aumento del rango de detección en otro 30% e integración con la estación hidroacústica (GAS) de detección de señales hidroacústicas (OGS) "Svet-M".

Antenas GAS MG-10M (ShP), MG-13M (OGS) MG-15M (comunicación) Submarinos diesel-eléctricos del proyecto 641

DEPL pr 641
De las memorias de un oficial del servicio técnico de radio con el proyecto B-440 641:
En general, los barcos del Proyecto 641 resultaron ser un proyecto exitoso ... El B-440 tenía silenciosos motores diesel 2D42 de pequeño tamaño, un producto maravilloso; muy buena SHPS MG-2M de 10 bandas (cierto, con un ASC, pero la acústica prefería el control manual), pero la grabadora "Comet" era pésima para grabar ruido, y la grabación era una confirmación obligatoria de contacto ...
La primera área en la que buscar nos dieron el mar Tirreno, donde descubrimos por primera vez nuestro primer SSBN. La ventaja de nuestros barcos en la etapa inicial era que estábamos prácticamente en una emboscada, teníamos una velocidad de 2,5-3 nudos en los motores del barco económico, y los SSBN que circulaban en el área de su deber de combate no nos escucharon y nos "chocaron". El hecho de que el barco fuera nuevo, con un nuevo modelo de ShPS MG-10M en transistores, también ayudó significativamente. Este primer contacto fue recordado sobre todo por el hecho de que lideramos el portador de misiles durante un tiempo inusualmente largo: 1 hora 56 minutos, siguió siendo nuestro tipo de récord. Pero además, en la siguiente etapa, manteniendo contacto y persiguiendo SSBN, nuestro atraso técnico comenzó a afectar de inmediato: dimos un movimiento promedio (más de 6 nudos), y el Amer inmediatamente nos encontró, comenzó a evadir y agregar velocidad. A 14-16 nudos, se alejó fácilmente de nosotros (podríamos desarrollar esa velocidad por un corto tiempo, pero al mismo tiempo estaríamos completamente sordos e inmediatamente perderíamos el contacto) ...
… Dado que había unas condiciones hidrológicas asombrosas: seguimos escuchando SSBN a mayor distancia y lo seguimos. Después de un tiempo, se dio cuenta de esto y lanzó un simulador de submarino, una copia muy precisa de sí mismo en términos de ruido. No pudimos mantener contacto con los dos objetivos en el ShPS, ni tampoco determinar cuál es el verdadero. Como resultado, perdimos el contacto ...
Por lo general, el tiempo de contacto con el SSBN era de 10 a 20 minutos, ya no podíamos mantener al "enemigo" (indiqué las razones arriba). Pero nuestros informes del descubrimiento ayudaron enormemente al Estado Mayor de la Armada a descubrir las rutas de patrulla de los SSBN y dirigir otras fuerzas hacia ellos. Durante esta autonomía, el B-440 tuvo 14 contactos estables con SSBN.
La primera área en la que buscar nos dieron el mar Tirreno, donde descubrimos por primera vez nuestro primer SSBN. La ventaja de nuestros barcos en la etapa inicial era que estábamos prácticamente en una emboscada, teníamos una velocidad de 2,5-3 nudos en los motores del barco económico, y los SSBN que circulaban en el área de su deber de combate no nos escucharon y nos "chocaron". El hecho de que el barco fuera nuevo, con un nuevo modelo de ShPS MG-10M en transistores, también ayudó significativamente. Este primer contacto fue recordado sobre todo por el hecho de que lideramos el portador de misiles durante un tiempo inusualmente largo: 1 hora 56 minutos, siguió siendo nuestro tipo de récord. Pero además, en la siguiente etapa, manteniendo contacto y persiguiendo SSBN, nuestro atraso técnico comenzó a afectar de inmediato: dimos un movimiento promedio (más de 6 nudos), y el Amer inmediatamente nos encontró, comenzó a evadir y agregar velocidad. A 14-16 nudos, se alejó fácilmente de nosotros (podríamos desarrollar esa velocidad por un corto tiempo, pero al mismo tiempo estaríamos completamente sordos e inmediatamente perderíamos el contacto) ...
… Dado que había unas condiciones hidrológicas asombrosas: seguimos escuchando SSBN a mayor distancia y lo seguimos. Después de un tiempo, se dio cuenta de esto y lanzó un simulador de submarino, una copia muy precisa de sí mismo en términos de ruido. No pudimos mantener contacto con los dos objetivos en el ShPS, ni tampoco determinar cuál es el verdadero. Como resultado, perdimos el contacto ...
Por lo general, el tiempo de contacto con el SSBN era de 10 a 20 minutos, ya no podíamos mantener al "enemigo" (indiqué las razones arriba). Pero nuestros informes del descubrimiento ayudaron enormemente al Estado Mayor de la Armada a descubrir las rutas de patrulla de los SSBN y dirigir otras fuerzas hacia ellos. Durante esta autonomía, el B-440 tuvo 14 contactos estables con SSBN.
Esto se escribió sobre los años 70, pero de hecho, el Fenix-MG-10 SHPS sobrevivió no solo hasta principios de los 90 (la retirada completa de sus portaaviones de la Armada), sino también hasta el día de hoy. Una de las variantes del moderno MGK-400EM (MGK-400EM-01) preveía la posibilidad de modernización del hardware del MG-10M, MG-13M Sviyaga M, MG-15M Svet M. En forma modificada (con nuevas antenas), esta es hoy una de las opciones de armas hidroacústicas para nuevos proyectos de pequeños submarinos (por ejemplo, de la serie Piranha del Malakhit SPBM).
El competidor nacional de "Phoenix" y "Plutonium" de "Vodtranspribor" fue el complejo (SHP y GL) GAS "Arktika", desarrollado en NII-3 (NII "Morfizpribor") desde 1952. para submarinos de mediano y gran desplazamiento.
De hecho, el "Ártico" era un gran oído hidroacústico con accionamientos de rotación, un reflector y 4 transductores hidroacústicos reversibles. Modos de funcionamiento: ШП, АСЦ, ГЛ. Para el modo WB, la antena se rotaba automáticamente en un sector de búsqueda dado a velocidades de 3, 6 y 16 grados por segundo. Para el modo GL, se introdujo por primera vez en recepción un banco de filtros Doppler.

Antena GAS "Ártico"
En servicio con el GAS "Arktika-M" se adoptó solo en 1960 bajo la designación MG-200. "Arktika-M" tenía una serie de graves deficiencias, pero era el único submarino GAS doméstico de esa época, lo que permitió determinar la profundidad de inmersión del objetivo submarino.
Oficial con B-440:
La lámpara MG-200 resultó ser prácticamente inútil, los SSBN o no escucharon en absoluto, o muy débilmente, pero se calentaron como un samovar. Tuvo problemas con el sistema hidráulico: la antena se hundió a lo largo del ángulo de inclinación. Constantemente, debido a la alta humedad, su parte explosiva del generador falló, luego hubo una falla, luego aquí, los transformadores y otros elementos se acortaron. Usamos el GL en SSBN una vez, dimos 2 paquetes, el eco era débil, borroso, la distancia era de unos 20 kb, pero el estadounidense se sacudió, como si le hubieran vertido agua hirviendo en el culo.
Primera generación de posguerra. "Posible enemigo"
El análogo estadounidense de Phoenix y MG-10 fue el AN / BQR-2 SHPS (su posterior modernización en los elementos de estado sólido AN / BQR-21). La antena GAS constaba de 48 hidrófonos lineales de 43 pulgadas (1092 mm) de alto, formando un cilindro de 68 pulgadas (1727 mm) de diámetro. Rango de trabajo 0,5-15 kHz. El rango de detección de los submarinos diésel-eléctricos, actualizado según el proyecto GUPPY, que se ejecutan bajo el tubo, es de unas 15-20 millas náuticas.

ShPS AN / BQR-2 (EE. UU.)
Las capacidades técnicas del AN / BQR-2 y MG-10 estaban cerca, por lo que la eficiencia real fue determinada por la capacitación de los operadores, el uso competente del GAS por parte de los comandantes y oficiales del submarino y su ruido.
Contrariamente a la creencia generalizada de que los submarinos de la Marina de los EE. UU. Supuestamente no usan los modos activos del SAC (GL), no solo los usan, sino que los consideran extremadamente importantes en la batalla.
Así describió Norman Friedman los primeros duelos entre submarinos y submarinos diesel-eléctricos en su libro US Submarines Since 1945. Estamos hablando de la denominada Operación Rum Tub ("Baño de ron"), una serie de ejercicios durante los cuales se practicaban las batallas bajo el agua entre el primer submarino "Nautilus" del mundo y los submarinos diésel:
Durante el ejercicio British Rum Tub, el Nautilus podía hacer lo que quisiera para enfrentarse a las modernas fuerzas antisubmarinas. Mientras mantenía una posición bajo el convoy, el Nautilus descubrió y destruyó condicionalmente el submarino diesel-eléctrico Qwillback, que intentó acercarse y atacar al barco sobre el Nautilus.
Así, el Nautilus demostró su potencial como vehículo de escolta submarino.
Moviéndose a una velocidad de 22 nudos, detectó el submarino británico diesel-eléctrico "Auriga" utilizando el modo activo del GAS SQS-4 a una distancia de 3000 yardas (2730 metros, 14,8 cabina) y realizó un ataque simulado.
Durante ejercicios posteriores, el helicóptero que buscaba al submarino corrió hacia un cohete verde (un cohete de señales lanzado desde debajo del agua desde un submarino, después de salir del agua y despegar hacia arriba, desciende en paracaídas y arde durante 10-20 segundos), que fue lanzado por el Nautilus, pero ya había recorrido 3500 yardas, una distancia segura de cualquier armasque el helicóptero podría caer.
En 1957, el Nautilus había realizado 5000 ataques de entrenamiento. Las estimaciones conservadoras mostraron que un submarino no nuclear se habría hundido unas 300 veces, pero el Nautilus se hundió condicionalmente solo 3 veces.
Usando sus rutas de GAS activas, los submarinos nucleares podrían mantener contacto con los diesel sin riesgo de ser contraatacados.
La Marina de los Estados Unidos decidió abandonar la construcción de submarinos diésel y aceptar el alto costo de un submarino completamente nuclear. Teniendo en cuenta las estimaciones de Wilkinson (comandante del "Nautilus"), los valores de la velocidad de los submarinos en la TTZ aumentaron significativamente en comparación con 1950. El resultado fue Skipjack.
Así, el Nautilus demostró su potencial como vehículo de escolta submarino.
Moviéndose a una velocidad de 22 nudos, detectó el submarino británico diesel-eléctrico "Auriga" utilizando el modo activo del GAS SQS-4 a una distancia de 3000 yardas (2730 metros, 14,8 cabina) y realizó un ataque simulado.
Durante ejercicios posteriores, el helicóptero que buscaba al submarino corrió hacia un cohete verde (un cohete de señales lanzado desde debajo del agua desde un submarino, después de salir del agua y despegar hacia arriba, desciende en paracaídas y arde durante 10-20 segundos), que fue lanzado por el Nautilus, pero ya había recorrido 3500 yardas, una distancia segura de cualquier armasque el helicóptero podría caer.
En 1957, el Nautilus había realizado 5000 ataques de entrenamiento. Las estimaciones conservadoras mostraron que un submarino no nuclear se habría hundido unas 300 veces, pero el Nautilus se hundió condicionalmente solo 3 veces.
Usando sus rutas de GAS activas, los submarinos nucleares podrían mantener contacto con los diesel sin riesgo de ser contraatacados.
La Marina de los Estados Unidos decidió abandonar la construcción de submarinos diésel y aceptar el alto costo de un submarino completamente nuclear. Teniendo en cuenta las estimaciones de Wilkinson (comandante del "Nautilus"), los valores de la velocidad de los submarinos en la TTZ aumentaron significativamente en comparación con 1950. El resultado fue Skipjack.

Submarino de alta velocidad tipo "Skijack" (con SHPS BQR-4 y GLS SQS-4)
Es decir, incluso al detectar repentinamente un submarino diesel-eléctrico a corta distancia en un silo (o por el hecho de usar un arma de torpedo con él), el submarino del "enemigo potencial" "rompió la distancia" más allá del uso efectivo de torpedos, luego de lo cual, usando el GL, pudo disparar tranquilamente nuestro submarino diesel-eléctrico. (y el menor nivel de ruido de los submarinos diesel-eléctricos ya no importaba aquí).
Inicialmente, el "sonar estándar" para los submarinos estadounidenses PLA y diesel-eléctricos era el AN / BQS-4 GLS con una frecuencia operativa de 7 kHz y un alcance de hasta 7 km (ligeramente superior a nuestro Plutonium GLS).
Segunda generación. Estados Unidos
El fuerte aumento de la importancia de la confrontación submarina después de la Segunda Guerra Mundial llevó al despliegue de trabajos de investigación a gran escala para mejorar el GAS en los EE. UU. Y la URSS (con ambas partes utilizando activamente la experiencia alemana). La principal dirección del desarrollo se ha convertido en la provisión de un aumento significativo en el rango de detección a través del desarrollo del rango de baja frecuencia.
Su resultado práctico fue el nuevo GAS (y su integración como parte de complejos hidroacústicos - GAK) de la segunda generación de submarinos de la posguerra.
Los primeros aquí fueron los EE. UU., Que desplegaron a fines de la década de 50 la construcción en serie de submarinos de tipo Thresher (después de la muerte del submarino líder, la serie se conoció como Permiso) y la construcción forzada de una gran serie de SSBN.
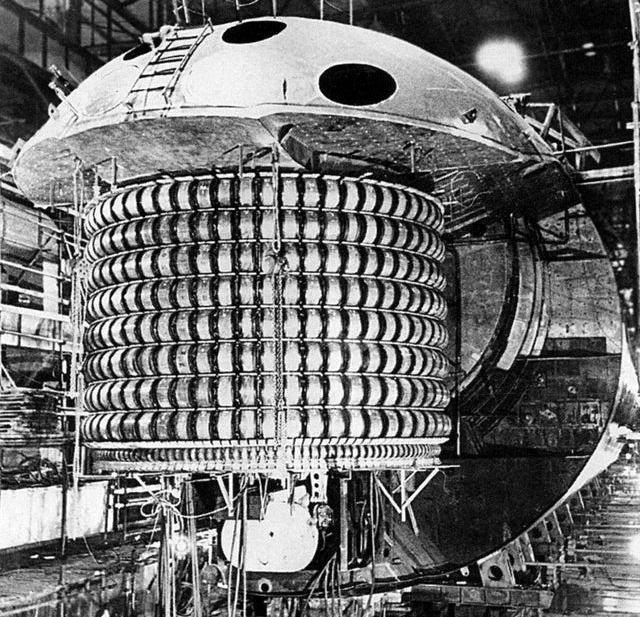
El elemento clave del nuevo submarino multipropósito es el complejo hidroacústico AN / BQQ-2 (GAC) con una antena de arco esférico de gran tamaño (4,5 m de diámetro) GAS AN / BQS-6 (modos WB y GL), una antena conforme de "herradura" de baja frecuencia AN / Equipo de clasificación de objetivos BQR-7, AN / BQQ-3, aparato de detección de distancia de objetivo pasivo AN / BQG-2, equipo de registro y análisis AN / BQH-2 y estación de comunicación submarina AN / BQA-2 (ZPS).
En 1960, durante las pruebas del submarino diesel-eléctrico GAS, pasando por debajo del snorkel, se descubrió el GAS AN / BQR-7 a una distancia de 75 millas náuticas.
Las antenas receptoras del tipo SHPS AN / BQG-2 se espaciaron a lo largo del casco del submarino, lo que permite utilizar el método de fase para determinar la distancia actual al objetivo.

Antenas principales de BQQ-2 SJC: esféricas y conformadas AN / BQR-7
Para el SSBN de la Marina de los EE. UU., No se instaló una antena esférica, el NLS de baja frecuencia AN / BQR-7 proporcionó detección de largo alcance.
La variante AN / BQG-2 para submarinos diesel-eléctricos fue muy interesante, con antenas del tipo "aleta de tiburón", que sobresalían notablemente por encima de la sintonía.

DEPL "Darter" SS-576 con antenas "aleta de tiburón" GAS AN / BQG-2
Hablando sobre el GAS de la Marina de los Estados Unidos, cabe destacar que su desarrollo procedió en una conexión muy estrecha con los temas del uso de armas, además, en condiciones reales de batalla (incluyendo el uso generalizado de contramedidas hidroacústicas, SRS).
En gran medida sobre esta base, apareció una antena esférica en los submarinos multipropósito de la Marina de los EE. UU., Que proporcionó en la zona cercana, incl. la capacidad de determinar la profundidad del objetivo. La inmunidad al ruido extremadamente baja de los sistemas de búsqueda de torpedos (HSS) para su uso efectivo en las condiciones del SGPD requirió el "apagado" del SSN en la zona de operación del SGPD y su "inclusión" a lo largo del paso de la "zona SGPD". Esto lo proporcionaba el sistema de telecontrol de los torpedos Mk37 mod.1, pero el problema era que el SSN tenía una abertura estrecha en el plano vertical, y para no perder el objetivo y "girar la cabeza" a tiempo, era necesario conocer la profundidad real del objetivo submarino evadido. (y llévale tu torpedo).
La aparición de la determinación pasiva GAS de la distancia al objetivo también se asoció con el uso de armas de torpedo, y el punto aquí no es tanto que conocer la distancia facilite en gran medida un ataque con torpedos, lo principal fue que cuando se usan torpedos con una ojiva nuclear (torpedo eléctrico Mk45 a control remoto) era necesario saber exactamente la distancia actual al objetivo que evade (el área real afectada de la ojiva nuclear era muy local).
Segunda generación. nosotros
Para nuestro gran pesar, a pesar de los grandes éxitos de nuestra ciencia e industria en la creación de nuevos GAS y GAK, en nuestro país se pasaron por alto en gran medida las cuestiones de la estrecha integración de las armas y la acústica.
Como en los EE.UU., como resultado de la I + D a gran escala "Shpat", se justificó la transición a un rango de frecuencia significativamente más bajo y el uso de antenas hidroacústicas de gran tamaño (en términos de capacidad portadora).
Vale la pena señalar que el desarrollo de nuevos GAS se llevó a cabo sobre una base prácticamente competitiva (MG-10 y Kerch, Vodtranspribor y Arktika y Rubin, Morfizpribor). Este fue el caso en muchas áreas de alta tecnología, por ejemplo, los sistemas de control para nuevos misiles antibuque operacionales (ASM) fueron desarrollados simultáneamente por NII Granit y Altair. Sí, hubo una cierta duplicación de trabajo y costos, pero al mismo tiempo hubo una red de seguridad en proyectos "riesgosos" y, lo más importante, la competencia obligó a los desarrolladores a dar lo mejor de sí mismos en el trabajo al "101%", y esto se justificó plenamente.
El SJSC "Kerch" para buques de misiles de propulsión nuclear fue desarrollado por la OKB de la planta "Vodtraspribor". La asignación táctica y técnica (TTZ) fue emitida por la Armada a fines de 1959 y preveía un aumento en los rangos de detección en el nuevo SAC en un orden de magnitud con respecto al SAS existente. Para ello, se proporcionó una antena cilíndrica nasal de gran tamaño (con un diámetro de 4 my una altura de 2,4 m), una antena extendida a bordo (33x3 m) con un rango de frecuencia de 0,2-2 KHz.

El indicador de la vista circular del canal del silo del SJSC "Kerch" con un barrido de dos rangos de frecuencia (baja frecuencia, optimizada para trabajar en objetivos de superficie y frecuencia media para trabajar en submarinos)
Pruebas de una muestra experimental de esta antena en el Océano Pacífico en 1960-1961. Por primera vez se proporcionó la detección de objetivos de superficie a una distancia de más de 250 km.
Las rutas para la detección de señales hidroacústicas (OGS) poseían altas capacidades con una gran antena cilíndrica principal con un diámetro de 2,5 my un sonar (GL).
El tracto GL tenía una antena potente (100 y 400 kW de potencia eléctrica) de gran tamaño (2,5x2 m), giratoria en ambos planos (verticalmente de + 15 ° a - 60 °), que aseguraba la detección del objetivo incluso en la zona de "sombra" debido a " reflexiones de fondo ".
Contrariamente a la opinión generalizada "acerca de la electrónica de tubo caliente de la URSS", los transistores se utilizaron ampliamente en "Kerch" (por ejemplo, en preamplificadores).
SJSC "Kerch" superó con éxito la IG en 1966 y ya en 1967 la República de China "Balaklava" comenzó su profunda modernización. Desafortunadamente, se suspendió en 1969 debido al desarrollo del Rubicon SJSC (más sobre eso a continuación).
Para los buques de propulsión nuclear multipropósito, el Instituto de Investigación Morfizpribor desarrolló la Sociedad Anónima Estatal Rubin con una antena principal que era más grande que la antena Kerch, sin antenas a bordo y con una composición diferente de caminos. En términos del rango de detección técnica en el silo, el "Rubin" superó ligeramente al "Kerch" (debido a la antena más grande), pero la principal desventaja del "Rubin" resultó ser el tracto GL, que era débil en términos de capacidades de búsqueda independientes, que, debido al limitado sector de trabajo, incluso se llamó "el tracto de medición de distancia (CARNÉ DE IDENTIDAD) ". La posibilidad de una búsqueda independiente de objetivos por el tracto GL por parte de los desarrolladores de "Rubin", por desgracia, no se consideró ni se estudió.
La antena receptora cilíndrica principal del SJSC "Rubikon" y la antena giratoria del tracto GL ID en el submarino del proyecto 671
En lugar de un sistema de detección de minas intracomplejo (como en Kerch), se desarrolló un muy buen MG-509 Radian (más sobre eso a continuación).
Para el pequeño submarino nuclear altamente automatizado del Proyecto 705, se desarrolló la Sociedad Anónima Estatal Okean, que tenía un subsistema de sonar muy desarrollado. Curiosamente, en las etapas iniciales de desarrollo, se consideró la antena esférica principal para la Okean State Joint Stock Company (como en el submarino de la Marina de los EE. UU.), Que fue abandonada durante el proceso de desarrollo por razones tecnológicas en favor de una antena principal cilíndrica convencional.

Proyecto de pre-bosquejo 705 con una antena esférica de SJSC "Ocean"
En cuanto a su nivel técnico, los SJSC "Kerch", "Rubin", "Ocean" se ejecutaron a un nivel muy alto y fueron bastante "competitivos" con el BQQ-2 estadounidense. El problema de una pérdida significativa de nuestros submarinos en ese momento en el rango de detección no se asoció con el GAS, sino con su ruido mucho mayor (incluida la interferencia con su propio GAS), un claro ejemplo de lo cual es el conocido gráfico comparativo del ruido (y su reducción) de los submarinos de la Marina de los EE. UU. y la marina soviética.
De un artículo del contralmirante A. Berzin "Guardfish está persiguiendo a K-184":
... en esta campaña en particular, el rango de detección del proyecto 675 por un submarino clase Sturgeon a velocidades de bajo ruido es de 24 cables, y el rango de detección del submarino Guardfish del proyecto 675 a velocidades de bajo ruido es de 2 cables ...
Guardfish tenía una ventaja sobre K-184 en los siguientes parámetros:
- velocidad de 5 nudos;
- el ruido es 6 veces menor;
- la presencia del arma "Sabrok", que no teníamos;
- El rango de detección del SAC es 6 veces mayor que el nuestro.
Sin duda, todo esto contribuyó al seguimiento a largo plazo del submarino Guardfish para nuestro submarino. Pero, a pesar de esto, nuestro submarino pudo detectar la presencia de rastreo y separarse del submarino Guardfish. Como dicen, la necesidad de inventar es astuta.
La detección de seguimiento fue facilitada por:
1. Hidrología desfavorable en el mar de Filipinas, que obligó al pez guardián a acortar la distancia de seguimiento para no perder contacto, lo que a su vez permitió que K-184 lo detectara.
2. Usando el radar Guardfish, la primera vez que detectamos su operación a corto plazo el 27 de mayo.
3. El uso del submarino K-184 de maniobras no estándar al detectar rastreo, lo que también permitió al K-184 romper con la persecución de Guardfish.
David Minton calificó en su artículo a esta maniobra de agresiva y de adelantamiento a gran velocidad, lo que personalmente me sorprende, porque en esa situación, consideré sus acciones como extremadamente hostiles y peligrosas ... a distancias muy peligrosas, de modo que en algunos compartimentos escuchamos el sonido de las hélices Guardfish.
Guardfish tenía una ventaja sobre K-184 en los siguientes parámetros:
- velocidad de 5 nudos;
- el ruido es 6 veces menor;
- la presencia del arma "Sabrok", que no teníamos;
- El rango de detección del SAC es 6 veces mayor que el nuestro.
Sin duda, todo esto contribuyó al seguimiento a largo plazo del submarino Guardfish para nuestro submarino. Pero, a pesar de esto, nuestro submarino pudo detectar la presencia de rastreo y separarse del submarino Guardfish. Como dicen, la necesidad de inventar es astuta.
La detección de seguimiento fue facilitada por:
1. Hidrología desfavorable en el mar de Filipinas, que obligó al pez guardián a acortar la distancia de seguimiento para no perder contacto, lo que a su vez permitió que K-184 lo detectara.
2. Usando el radar Guardfish, la primera vez que detectamos su operación a corto plazo el 27 de mayo.
3. El uso del submarino K-184 de maniobras no estándar al detectar rastreo, lo que también permitió al K-184 romper con la persecución de Guardfish.
David Minton calificó en su artículo a esta maniobra de agresiva y de adelantamiento a gran velocidad, lo que personalmente me sorprende, porque en esa situación, consideré sus acciones como extremadamente hostiles y peligrosas ... a distancias muy peligrosas, de modo que en algunos compartimentos escuchamos el sonido de las hélices Guardfish.
SRS y el problema de la inmunidad al ruido
El problema clave de los SAC domésticos analógicos era su baja inmunidad al ruido. Por supuesto, se estaba trabajando seriamente en esto, pero las capacidades de la tecnología analógica eran objetivamente limitadas. Si en el rango de alta frecuencia todavía era posible proporcionar una alta inmunidad al ruido debido a la pequeña longitud de onda y una apertura decente de la antena, entonces el pequeño rango dinámico de la dirección del ruido que encuentra las rutas de los SAC y un nivel significativo de lóbulos laterales de sus antenas receptoras condujo al hecho de que, desde el uso del GPT de baja frecuencia PLA de la Marina de los EE. UU., Nuestros SAC en el modo de búsqueda de dirección de ruido estaban "ciegos" (incluso completamente). Y el enemigo nos lo ha demostrado muchas veces.
Debe enfatizarse aquí que desde el comienzo de los años 50, la Marina de los EE. UU., Considerando el SPDT (el tema requiere un artículo separado) como uno de los factores clave del combate submarino, realizó una serie de ejercicios de investigación con el uso generalizado de barcos, armas y SPDT. Se crearon SRS efectivos (incluidos los de baja frecuencia), se lanzó su producción en serie, fueron bien dominados por la Marina de los EE. UU. Y la OTAN y fueron utilizados ampliamente y masivamente por ellos. Aquellos. Lo que en la batalla para "cegar" el SAC del submarino de la Armada Soviética, los submarinistas estadounidenses habían ...
En la URSS, la situación fue la contraria. El SRS "se perdió" entre los "torpederos", "acústicos", "calculadoras", "mecánicos", "soldados rebeldes" ... Formalmente, las "estructuras de guerra electrónica" se encargaban de ellos, pero la "eficiencia" de tal control era tal que hasta hace muy poco el submarino de la Armada en absoluto no tenía un SGPD con supresión efectiva de baja frecuencia (MG-74, en el que hubo un intento de "hacer algo así", tenía fallas al nivel del TTZ original).
La base de la carga de municiones del SGPD de la Armada de la URSS eran "burbujas" contundentes del tipo GIP-1 y MG-34, que tenían una baja eficiencia (en el rango de baja frecuencia generalmente era casi cero). Al mismo tiempo, estos problemas no significan en absoluto que no haya oportunidades. ¡Había! Un ejemplo de esto es el muy, muy digno simulador autopropulsado MG-44, fabricado en 1967, o el dispositivo MG-104 de finales de los 80.
Es solo que la tarea de crear SGPD efectivos para submarinos navales no estaba realmente establecida, y el trabajo que se llevó a cabo sobre este tema fue casi completamente una imitación de actividad violenta. Nuestros submarinistas no tenían medios efectivos del SGPD o eran extremadamente limitados (MG-44, MG-104).
Todo esto, cuando entraba en contacto con un "probable enemigo" en el mar, a veces acarreaba consecuencias extremadamente graves.
Contralmirante Shtyrov:
El ingenioso plan de Neulyba, deslizarse a lo largo de las fuerzas de seguridad hasta la ubicación prevista del portaaviones, resultó ser ridículo: en media hora, el barco fue bloqueado firmemente por barcos de todos los lados del horizonte ... Los golpes de paquetes poderosos golpean el cuerpo como mazos. Las "nubes de gas" creadas por los cartuchos de dióxido de carbono disparados por el barco, al parecer, no molestaron a los Yankees ...
Neulyba y Whisper no sabían (esto se dio cuenta mucho después) que las tácticas que tenían a su disposición ... eran irremediablemente anticuadas e impotentes frente a la última tecnología de los "malditos imperialistas".
Neulyba y Whisper no sabían (esto se dio cuenta mucho después) que las tácticas que tenían a su disposición ... eran irremediablemente anticuadas e impotentes frente a la última tecnología de los "malditos imperialistas".
La cruel ironía es que hubo otros ejemplos de la exitosa "iniciativa técnica" de los propios submarinistas (que, sin embargo, no despertaron el interés del mando, la ciencia y la industria). El contraalmirante V.V. Naumov, ex navegante del B-36, que se abrió paso en 1962 como parte de los "cuatro" submarinos diesel-eléctricos del proyecto 641 a Cuba, recuerda:
El principal factor de éxito en la separación del rastreo fue la decisión del comandante de la nave, el Capitán de segundo rango A.F. Dubivko. aplicar la técnica de supresión del sonar destructor propuesta por el suboficial Pankov. Habiendo determinado la frecuencia del sonar, Pankov notó que estaba en el rango de frecuencia de nuestra estación de comunicaciones hidroacústicas de Sviyaga y propuso sintonizarlo con la frecuencia del sonar del destructor para inutilizarlo en el momento adecuado utilizando la señal direccional continua del Sviyaga. El éxito de la maniobra de despegue superó todas las expectativas. Casi desde el momento en que se sumergió el B-2, el destructor no pudo ni por un minuto establecer contacto hidroacústico con él.

Destructor Charles P. Cecil (DD-835) junto al B-36 emergido
Hablando del SRS, es necesario señalar un problema más: el secreto hipertrofiado, como resultado de lo cual la "acústica" y "Rebovtsy" se sentaron y viajaron por separado, en "coches diferentes". Además, las características y capacidades reales de nuestro SGPD a veces simplemente se ocultaban a los "marinos" de la Marina.
En esta situación, las estaciones de detección de minas de alta frecuencia resultaron ser la salvación para la Armada de la URSS.
Detección de minas de GAS
La mina de GAS que detectaba SJSC "Kerch", "Ocean" y un GAS MG-509 "Radian" separado tenía una inmunidad al ruido muy alta, clasificando con confianza el GAS y los objetivos submarinos reales (y esto se aseguró incluso a altas velocidades de nuestro submarino).

Mina de GAS detectando MG-509 "Radian"
El tramo de detección de minas del Kerch SJSC, que no solo proporcionaba el propósito principal, sino que también “vio” torpedos con éxito a muy buenos rangos, también tenía capacidades muy altas. Por ejemplo, según los recuerdos del oficial de la mina y el control de torpedos de la Flota del Pacífico (y luego 28 NII) Bozin L.M., cuando disparaba desde el submarino del proyecto 670, observó personalmente en la pantalla GAS 53-65K torpedos, que fueron guiados a lo largo de la estela de un objetivo de superficie.
Aquellos. la ironía del destino es que hoy los barcos de misiles de propulsión nuclear de los proyectos 667 y 670 y los desarrollos a principios de los 60 bien podrían haber utilizado con éxito los anti-torpedos "Last", es decir hacer lo que los "más nuevos" "Boreas" no pueden hacer.
Aquí es necesario entender que dicho uso de la detección de minas HAS (como el principal medio de designación de objetivos en la batalla) "estaba en desacuerdo" con las recomendaciones oficiales, se hizo de manera proactiva y no llegó a las grandes manos de la Armada, incluso a pesar de que varios de nuestros principales éxitos logrados gracias a la detección de minas HAS y proactiva, inteligente y acciones decisivas de varios de nuestros comandantes de submarinos. Leer más en el artículo "A la vanguardia de la confrontación submarina. Submarino de la guerra fría".
Además, al crear un "Arfa" de detección de minas GAS unificado para el submarino de tercera generación, muy bueno en concepto y nivel técnico, ¡su escala de alcance fue "masacrada" sin razón alguna (solo 3 km)! Y esto es a pesar del hecho de que el detector de minas de GAS puede "ver" más lejos (naturalmente, no minas, sino objetivos submarinos), esto fue demostrado con éxito por "Radian" (que tenía la capacidad de volver a escalar la escala a una larga distancia).
resumen de las conclusiones
Casi todos se crearon a finales de los 50 y principios de los 70. Las muestras de GAS y GAK domésticos tenían un alto nivel técnico y capacidades de combate decentes.
Cabe señalar que durante este período el desarrollo del GAS en la URSS fue llevado a cabo por varias organizaciones, y con éxito. No hubo monopolización de obras.
La superioridad de los submarinos de un enemigo potencial en ese momento no se asoció con el retraso de la hidroacústica doméstica, sino con el ruido mucho mayor (y la interferencia de su GAS) de nuestros barcos de propulsión nuclear.
Al mismo tiempo, sin embargo, existía un problema extremadamente serio (y no completamente comprendido por el mando de la Armada de la URSS) de la inmunidad al ruido extremadamente insuficiente de nuestros SAC de segunda generación del AGPD "enemigo probable". Al usarlos, los SAC perdieron completamente la situación, y el seguimiento (o la batalla) solo fue posible de acuerdo con los datos de las estaciones de detección de minas de alta frecuencia.
Otro grave problema de la hidroacústica doméstica fue la modernización del GAS y GAK. A diferencia de la Marina de los Estados Unidos, a partir de la SAC de segunda generación, resultó prácticamente abandonada y se presentó una "justificación" pseudocientífica para ello. Y si el mismo "Ruby" parecía bastante decente a finales de los 60, entonces la continuación de su producción en serie en los 80. (para la reparación promedio de 671 proyectos) fue, en el contexto de los nuevos complejos BQQ-5 (instalados por la Marina de los EE. UU. incluso en submarinos viejos), simplemente una tontería y una absoluta "antigüedad".
La única excepción que tuvimos fue el MG-10 más débil en términos de potencial de detección, cuya modernización efectiva mostró las capacidades de los "grandes complejos" que la Marina no había detectado.
No hay comentarios:
Publicar un comentario