Autora: Ana Isabel Vázquez Mejías (Universidad de Cádiz)
Este artículo corresponde al Premio al Mejor Póster del II Congreso Nacional / IV Jornadas de Investigadores en Formación: Fomentando la Interdisciplinariedad que albergó la Universidad de Granada (UGR) en junio de 2019.
La superficie de la Tierra está formada por más del 70% de agua, de la cual aproximadamente el 97% de toda esa agua, está contenida en los océanos. Por lo tanto, parece lógico explotar e investigar este medio y es un hecho que muchas investigaciones actuales de diferentes áreas se desarrollan bajo el agua.

Desde el origen de la explotación marítima como fuente de alimentación en la prehistoria, la historia de las investigaciones relacionadas con el mar ha evolucionado. En los orígenes las primeras investigaciones y explotación marítima formales, se limitaron a tres campos: el militar, el de la cartografía (descubrimientos) y el comercio.
En concreto la evolución de la exploración subacuática ha sufrido un gran avance, gracias al pionero y divulgador de la ciencia e investigación submarina, el francés Jacques Yves Cousteau. Él y Jean de Mollard crearon el primer minisubmarino, la Souccoupe Plogeante, que permitió el acceso al ser humano a los cien metros de profundidad.
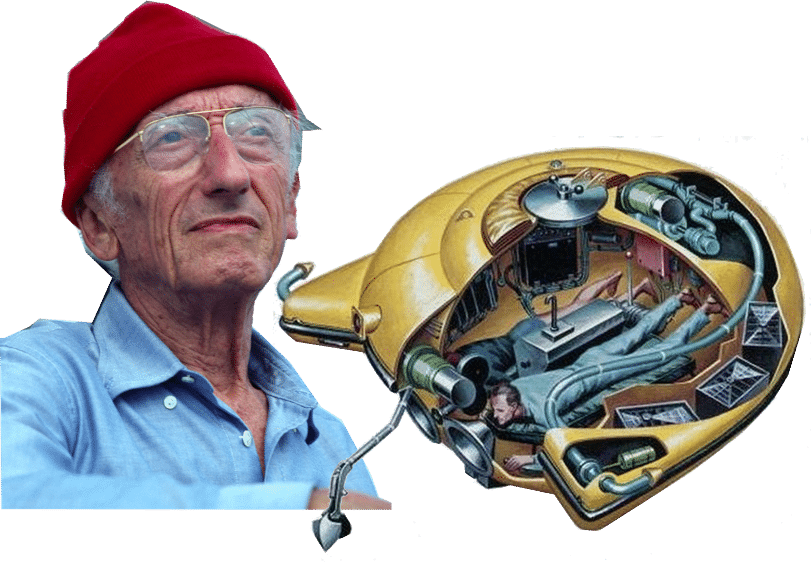
Jacques Yves Cousteau, la Souccoupe Plogeante
Posteriormente en la década de los 50 se creó el primer robot submarino llamado POODLE y desarrollado por Rebikoff, a partir de ese primer “ROV” (Remote Operated Vehicle), el desarrollo de los robots submarinos ha sido continuo, siendo en los últimos años cuando ha sufrido un mayor auge, gracias a la tecnología actual.

Rebikoff, POODLE
En la actualidad, los avances tecnológicos han permitido el diseño y construcción de ROVs cada vez más eficientes y con mayor funcionalidad, pero que presentan un coste relativamente elevado. Aunque recientemente hay empresas como BlueRobotics o Nido Robotics, que están ofreciendo ROVs de bajo coste y buenas prestaciones.
Para el desarrollo de un ROV OSH (Open Source Hardware) y (OSS Open Source Software), es necesaria la colaboración de investigadores de diferentes áreas de conocimiento, formando un equipo multidisciplinar, donde la colaboración es indispensable para el diseño, implementación e integración de cada uno de sus elementos: cabina, sensores, propulsión, control …, trabajando todos con un objetivo común, al mismo tiempo que desarrollamos investigaciones individuales.
Uno de los puntos críticos que se debe resolver y una de las líneas de investigación a desarrollar, es el posicionamiento del vehículo. Los sistemas de localización y posicionamiento de los vehículos submarinos se ven afectados por la falta de las referencias de navegación tradicionales (por ejemplo, GNSS Global Navigation Satellite System, o el más conocido GPS Global Positioning System), complicando el control de gobierno del vehículo submarino y dejándolo casi en exclusiva, al uso de sensores inerciales. La estabilización de vehículo submarino es de vital importancia, los movimientos de: balanceo, cabeceo, guiñada y traslación en los diferentes ejes que sufre el vehículo, deben ser controlados para el desarrollo posterior de un sistema de posicionamiento, estabilización, autopiloto, localización, control de la cámara …

Movimientos del vehículo submarino según la SNAME (Society of Naval Architects and Marine Engineers).
En resumen, para el desarrollo de un ROV, es necesario el desarrollo de múltiples investigaciones de diferentes áreas de conocimiento, que juntas dan como resultado un ROV capaz y fiable, siendo la gran oportunidad para muchos investigadores del medio subacuático, que no pueden desarrollar su investigación, por falta de presupuesto.
No hay comentarios:
Publicar un comentario