El grupo de investigación en Sistemas, Robótica y Visión de la UIB participa en el desarrollo de una plataforma submarina para recoger a largo plazo datos clave para la gestión de los ecosistemas marinos
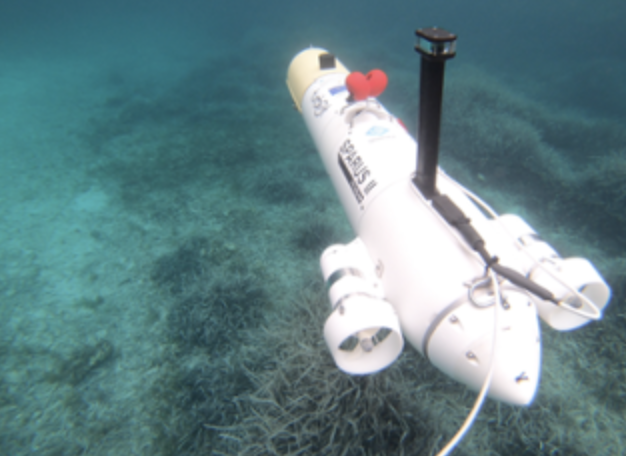
Robot subacuático Sparus II
Foto: PLOMEEl proyecto de investigación se llama PLOMEy sirve para monitorizar los ecosistemas marinos con vehículos subacuáticos autónomos como el Sparus II, que toma imágenes del fondo marino y que monitoriza de forma inteligente los ecosistemas marinos en tiempo real.
Un equipo de investigadores del grupo de investigación en Sistemas, Robótica y Visión (SRV) de la Universidad de las Islas Baleares participa del desarrollo de esta plataforma en el marco del proyecto Plataforma de Larga Duración para la Observación de los Ecosistemas Marinos (PLOME).
Según indican fuentes de la Universidad, la labor de los investigadores del grupo SRV de la UIB se centrará en la generación e implantación de algoritmos de inteligencia artificial para el análisis de imágenes obtenidas por las cámaras a bordo de las plataformas. El objetivo es la detección, identificación, determinación de las tallas y cuantificación de distintas especies marinas.
A lo largo de tres años, PLOME observará a los peces que hay en las costas y diseñará una plataforma no invasiva y modular para recabar datos imprescindibles para que la comunidad científica pueda supervisar, monitorizar y gestionar mejor los ecosistemas marinos. El proyecto dispone de un presupuesto de 1,5 millones de euros provenientes de fondos de la Agencia Estatal de Investigación y fondos europeos NextGenerationEU.
Además de la UIB, en el proyecto participan la Universidad de Girona (UdG), la Universidad Politécnica de Cataluña · BarcelonaTech (UPC), la Universidad Politécnica de Madrid (UPM), el Instituto de Ciencias del Mar (ICM-CSIC) y la empresa Iqua Robotics, SL.
No se trata de lanzar un robot al agua si no desarrollar un conjunto de sistemas independientes formado por estaciones fijas que permanecen en el fondo marino, vehículos submarinos y vehículos de superficie que trabajan conjunta y autónomamente para recoger datos.
Todos los sistemas disponen de baterías y sistemas de comunicación. Los vehículos submarinos pueden estacionarse para cargar las baterías y los vehículos de superficie pueden trabajar extrayendo energía del medio sin necesidad de intervención humana durante un largo periodo de tiempo (por ejemplo un mes).
Dado que los sistemas están muchos días trabajando, se utiliza inteligencia artificial para detectar las especias y adaptar y optimizar la monitorización del fondo marino según las detecciones.
Durante los tres años de duración del proyecto, se realizarán experimentos en diferentes lugares del litoral. El primero se hará en 2023 en la costa de Sant Feliu de Guíxols. Será la primera vez que las tecnologías desarrolladas trabajarán de forma conjunta para obtener datos del fondo marino. Durante el 2024, se realizarán dos experimentos finales del proyecto. El primero consistirá en una validación a profundidad, entre 300 y 500 metros, en un área protegida de pesca real cerca de la ciudad de Barcelona, mediante barco oceanográfico. En este experimento se validarán los sistemas de monitoreo en condiciones reales durante varios días, supervisando y operando los sistemas desde el buque.
El segundo experimento tendrá lugar en la costa de Vilanova y la Geltrú, y consistirá en validar todos los sistemas a poca profundidad a lo largo de una semana de forma ininterrumpida. La plataforma estará conectada con el observatorio marino OBSEA, lo que permitirá la monitorización en tiempo real de todos los sistemas para comprobar que funcionan correctamente.
En el futuro se podría extender la plataforma a las costas menorquinas, fruto de la participación de la UIB en este proyecto.
No hay comentarios:
Publicar un comentario